
Lophii22
ANA SAYFA / LOPHII22
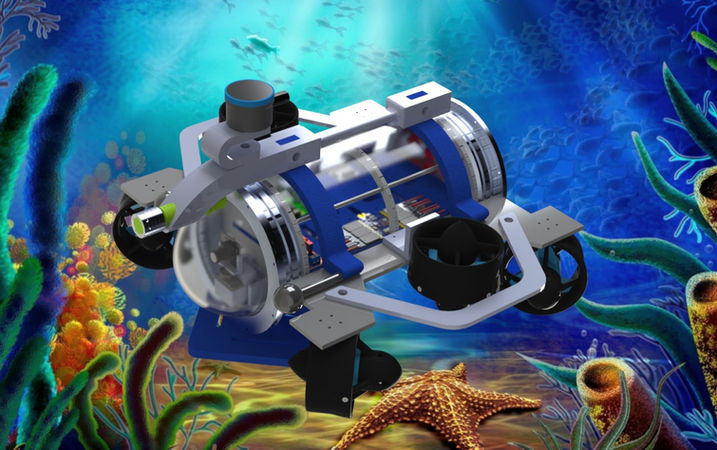
Lophi22, Lophi21'e göre daha zorlu şartlarda yapılacak şekilde tasarlanmıştır. Elektronik elemanlar alüminyum malzemeden yapılan sızdırmaz hazne içerisinde bulunmaktadır. Aracımıza özel olarak tasarlanmış kamera dönüş sistemi sayesinde Lophi22 hareket etmeden içerisinde bulunan kamera sağ, sol, yukarı ve aşağı şekilde hareket etmektedir. Aracımızın hareketini sağlayan motorların bağlı olduğu kanat, çeşitli analizler sonucu saç ve polimer malzeme kullanılarak sandviç yapı olarak tasarlanmıştır. Elektronik haznemiz torpido şeklinde tasarlanması sayesinde elektronik müdahaleye gerek duyulması halinde araçta bulunan tüm elektronik sistem yerine sadece devrelerin olduğu elektronik tabla çıkartılıp takılacak şekilde tasarlanmıştır. Aracımızın arkasında bulunan kuyruk kısmı hareket halinde akış dengeleyici olarak görev yapmaktadır.
İnsansız sualtı aracı kontrol, hareket, güç ve koruma olmak üzere 4 ayrı bölümden oluşmaktadır. Araç RPI4 ve PX4 ile oluşturulmuş kontrol ünitesi ile yönetilmektedir. Tüm sensör verileri burada toplandıktan sonra gerekli algoritmik süreçler uygulanarak karar verilir. Karar, hareket ile ilgili ise hareket ünitesine PX4 aracılığı ile Lenta Marine’den tedarik edilen G350 motorlara komut gönderilir. Karar koruma ile ilgili ise RPI4 üzerinden koruma ünitesine gider. Bu kısımda bulunan röle vasıtası ile istenilen aksiyon oluşturulur. Güç bölümü, devreye gerekli enerjiyi sağlar ve koruma hattı ile paralel çalışmaktadır.
Lophii22'de MAVLINK protokolü kullanılarak PX4 ile RPI4 arasında iletişim kurulur. Bu sayede araçta bulunan sensörlerden veri alınır. Lophii21'e kıyasla nesne tespiti için kullanılan YOLOv4-tiny modelinde performans iyileştirmeleri yapılmıştır. Belirli görevleri gerçekleştirmek için aracın navigasyon, güdüm ve kontrol algoritmaları tasarlanmıştır.